17.veebruar 2017
juhendaja: Jelle Feringa / Odico / EZCT Architecture & Design Research http://www.odico.dk / http://www.ezct.net/
osalejad: Sille Pihlak, Siim Tuksam, Märten Peterson, Johanna Jõekalda, Lauri Läänelaid, Siim Karro, Ljudmilla Georgijeva, Martin Melioranski
toetaja: Eesti Kultuurkapital, EKA
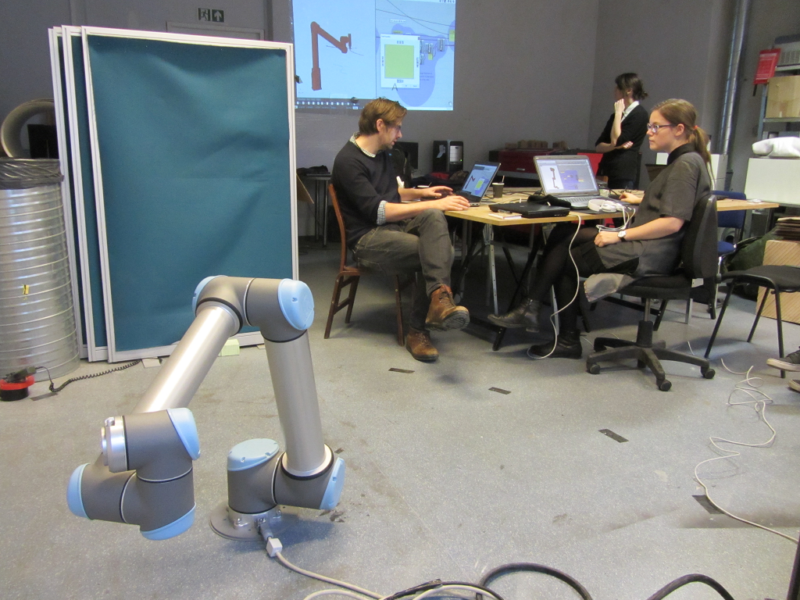
2017 aasta jaanuaris saabus arhitektuuri ja linnaplaneerimise osakonda 3DL kobot – koostöörobot – Universal Robots’ilt. Tegemist on kuue-teljelise UR10’ga, mille suurim haardeulatus on 1300mm (diagonaalis 2600mm) ning koormustaluvus 10kg. Kõik liigendid suudavad pöörata 360 kraadi – lõpmatult. UR10’e teiste eeliste seas on tavalise 230VAC voolu tarbimine ja integreeritud turvaseaded.
Ühepäevane töötuba, mis toimus Jelle Feringa / Odico juhendamisel, seadis eesmärgiks panna robot reaalajas reageerima vastavalt eeldefineeritud protseduurilistele reeglistikele.
Enne töötuba liigutasime robotit käeshoitavast konsoolist sarnaselt sellega, mis toimub tihti ka tööstuslikes rakendustes.
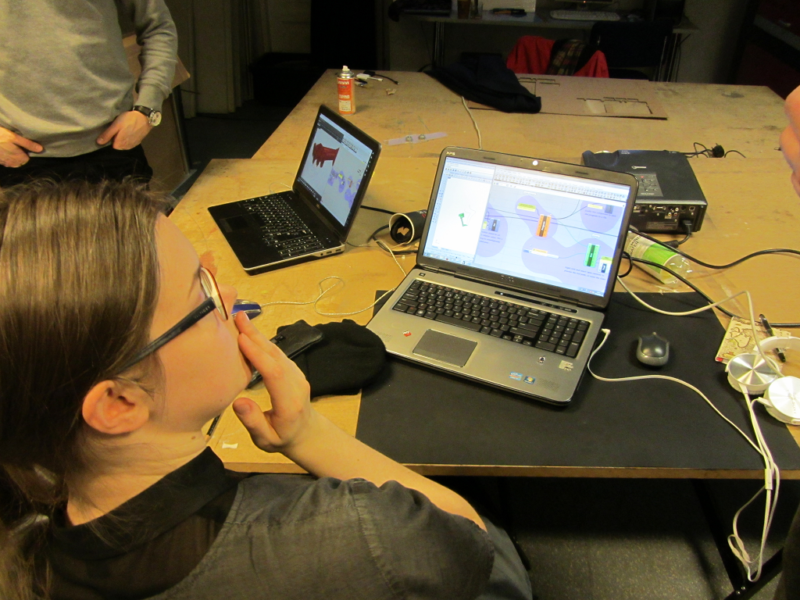
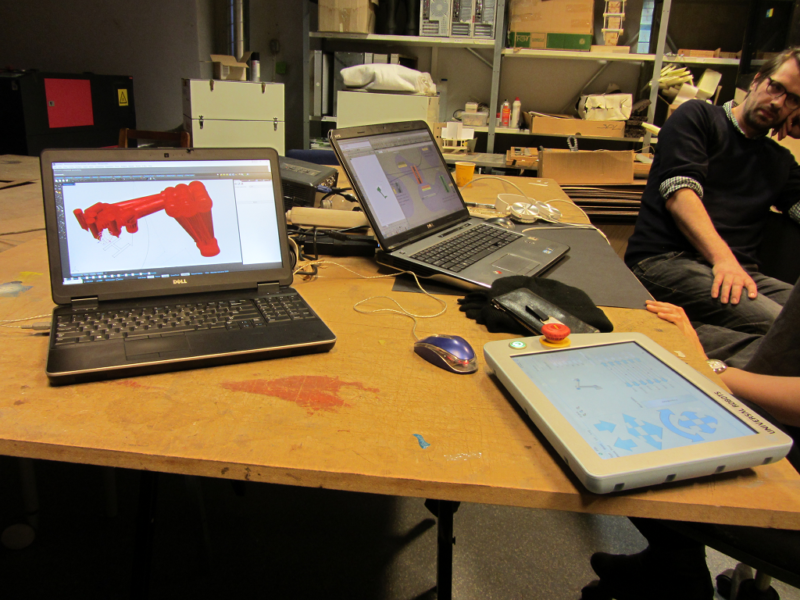
Jelle pikaajalised kogemused ja teadmised robotitehnoloogiatest rakendusid esmalt tarkvara otsingutele, mis seoks arhitektuuritudengitele sobiliku programmi laialdaselt kasutatava parameetrilise raamistikuga. Me valisime Grasshopper’i pealisehituse nimega Robots, mida kasutatakse nii ABB, KUKA kui ka UR robotite eriotsetarbeliseks programmeerimiseks üle TCP/IP võrguprotokolli.
Tarkvara on leitav https://github.com/visose/Robots
Tihe eksperimenteerimise ja koboti koodi kalibreerimisprotsess jõudis edukate tulemusteni ning päevani, mis täidetud tuleviku arendustele vundamendi loomisega, et integreerida masinlikke protsesse arhitektuursete uuringutega.